
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
- deep daiv. 2주차 팀 활동 과제
- deep daiv. WIL
- deep daiv. project_paper
- deep daiv. week3 팀활동과제
- deep daiv. week4 팀활동과제
- Today
- Total
OK ROCK
[RL] Policy Iteration 본문
week 3 구성 :
(1) Policy Iteration
(2) Value Iteration
(3) Dynamic Programming
中 Policy Iteratiion Review
1-1. Policy Evaluation
- Problem : 임의의 policy가 주어진 채, state-value function v_π 를 계산하는 것 (Prediction문제)
- Solution : For all s ∈ S ,


이렇게 반복을 통해 value function v_π를 계산하고 업데이트하는 것을 Iterative Policy Evaluation단계라고 한다.
- (예제) Evaluating a Random Policy in the Small Grid World

상황 설정 :
- Episodic MDP(discount factor = 1)
- Reward of -1 on all transitions until termination.(모든 움직임에 대해 -1 만큼의 보상)
- 모든 action a에 대해, π(a|s) = 0.25로 고정 => Random Policy
- 검정색 색칠되어있는 부분이 목표지점(Goal)


왼쪽의 v_k값을 계산하는 과정이 Policy Evaluation단계라고 보면되고, 오른쪽의 Greedy Policy라고 되어있는 부분은 다음에 설명할 Improvement단계이다. 이 두 단계를 합쳐서 <Policy Iteration>이라고 함.
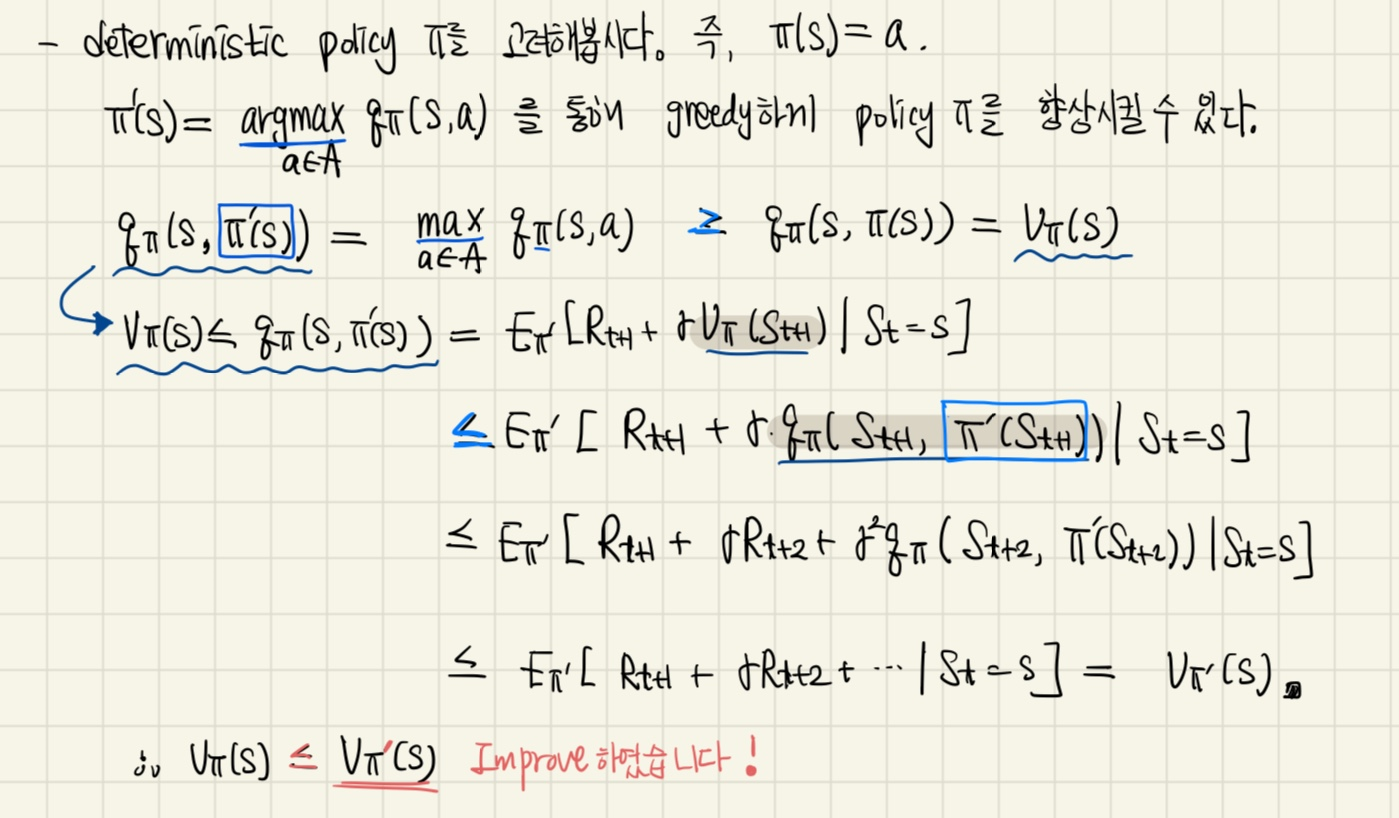
1-2. Policy Improvement
π ′ = greedy(v_π)
즉, 최적의 policy를 찾아가는 과정을 Policy Improvement라고 한다.
여기서는 greedy search를 제안하였지만, 더 다양한 알고리즘이 사용될 수 있다.(Generalized Policy Iteration)
Iteration을 거치며 Evaluation에서 구해가는 value-function이 향상되어 감을 다음과 같이 증명할 수 있다.
1-3. Policy Iteration
Policy Evaluation과 Improvement단계를 반복하며 최적의 v_π와 π를 찾아가는 것
문제가 Control로 바뀝니다. (Evaluation에서는 Prediction문제였음)
(결과적으로 v_π는 v_*가 될 것이고, π도 π_*로 수렴하게 됨)

이때, v가 v_π로 수렴할 때까지 계속 k를 늘려가야 하는가?
small grid world에서는 일반적으로 k = 3이면 optimal policy를 구하는 데에 충분한 숫자이다.
따라서, number of iterations k를 적당히 끊어서 반복을 돌리는 것을 Value Iteration이라고 한다.
즉, 매 iteration(k = 1만큼 증가할때)마다 policy를 업데이트해주는 것이다. (다음 장에 계속)
연휴 때 교재 정독 & 연습문제 4장까지.......
'Study > RL' 카테고리의 다른 글
| [RL] Bellman Equation (0) | 2023.09.23 |
|---|
